「自控元件及线路」3.2 三相、两相、单相异步电动机
本节介绍三相异步电动机的启动、调速及其机械特性
本节介绍两相异步电动机的控制方式和动态特性
本节介绍单相异步电动机的启动和单相串励电动机
文章目录
- 三相异步电动机
- 三相异步电机的机械特性
- 三相异步电机的起动
- 三相异步电动机的调速
- 变极调速
- 变转差率调速
- 变频调速
- 变频器
- 小偏差信号变频调速
- 矢量控制
- 异步电动机的电气控制
- 两相异步电动机
- 两相伺服电动机
- 两相伺服电机的控制
- 两相伺服电机的动态特性
- 单相异步电动机
- 工作原理
- 单相异步电机的起动
- 分相起动
- 罩极起动
- 单相串励电动机
- 单相串励电机的特性
三相异步电动机
三相异步电机的机械特性
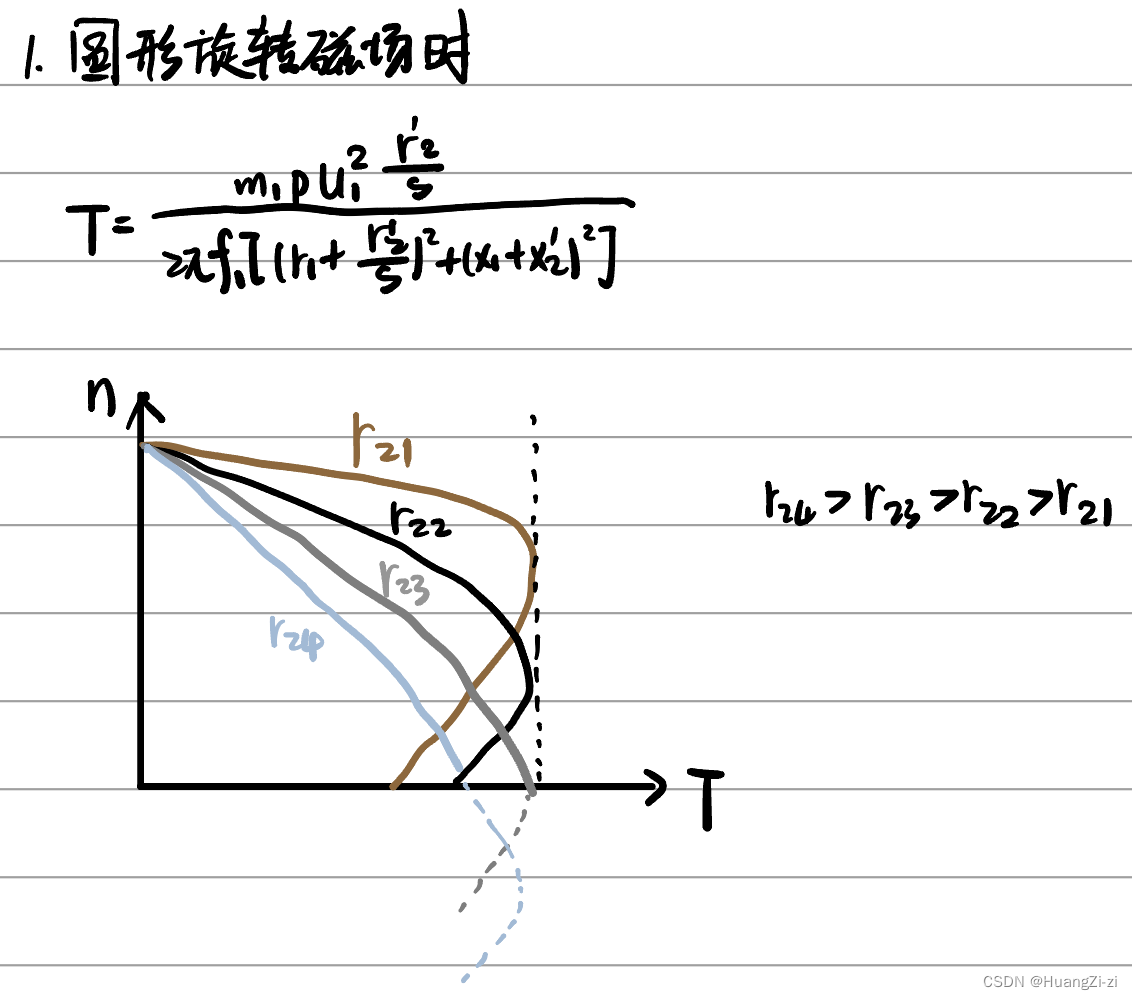
电磁转矩的参数表达式:
T = m 1 p U 1 2 r 2 ′ s 2 π f 1 [ ( r 1 + r 2 ′ s ) 2 + ( x 1 + x 2 ′ ) 2 ] T=\displaystyle \frac{m_1pU_1^2\frac{r_2'}{s}}{2\pi f_1[(r_1+\frac{r_2'}{s})^2+(x_1+x_2')^2]} T=2πf1[(r1+sr2′)2+(x1+x2′)2]m1pU12sr2′
异步电机的机械特性,是以电压为参变量,电磁转矩T与转差率s之间的关系(与转速n的关系也是一样的)
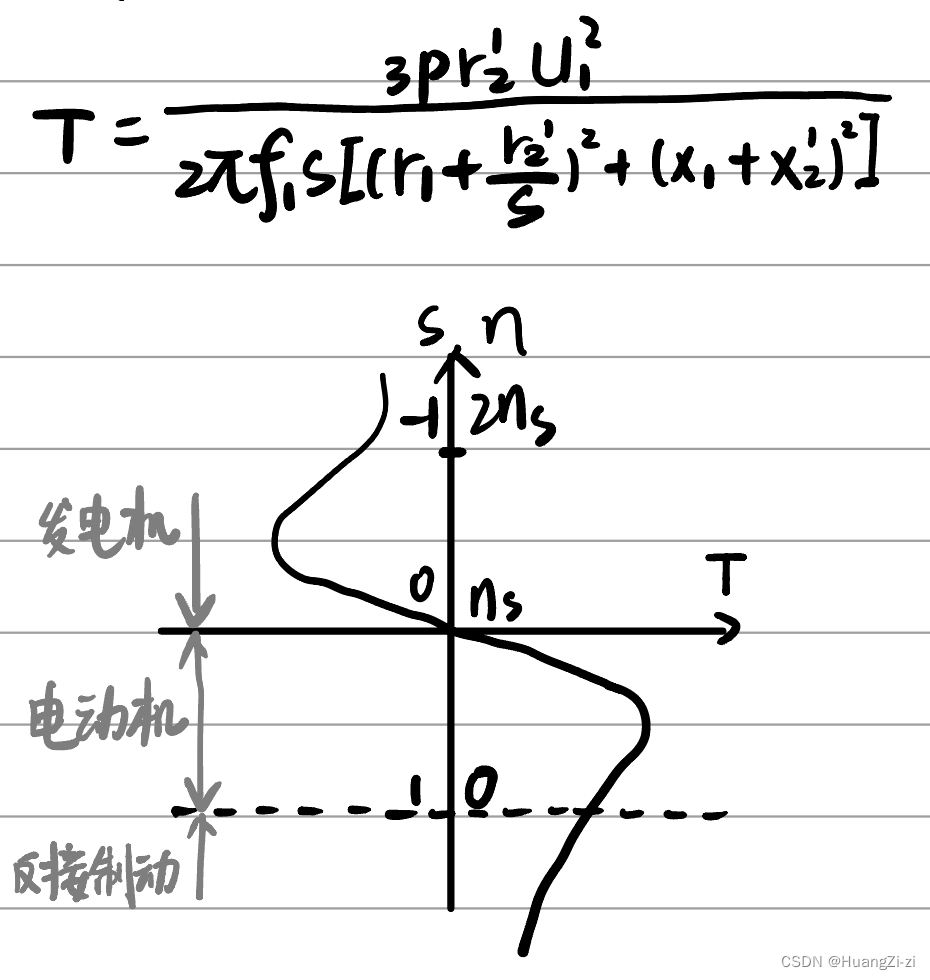
取出n和T都大于零的片段具体分析:(注意上图的横轴在s=0,下图的横轴在n=0)
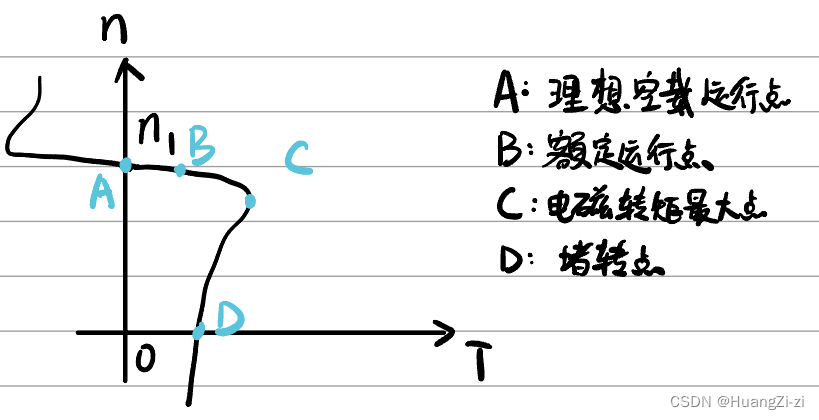

关于最大转矩的结论:
- T m T_m Tm与电压平方成正比,与 s m 、 U 1 N s_m、U_{1N} sm、U1N无关
- T m T_m Tm与转子回路电阻大小无关,而 s m s_m sm与转子回路电子大小成正比
- 定义过载能力 k m = T m T N k_m=\frac{T_m}{T_N} km=TNTm
关于起动转矩的结论:
- 起动转矩与电源电压平方成正比
- 频率越高、漏抗越大,起动转矩越小
- 绕线式电动机,转子回路电阻增大,起动转矩先增大后减小
- 定义起动转矩倍数 K s t = T s t T N K_{st}=\frac{T_{st}}{T_N} Kst=TNTst
机械特性的实用公式
上面的式子计算困难,所以采用以下实用公式:
T
T
m
=
2
s
m
s
+
s
s
m
\displaystyle \frac{T}{T_m}=\frac{2}{\frac{s_m}{s}+\frac{s}{s_m}}
TmT=ssm+sms2
其中
s
m
=
R
2
′
X
k
,
X
k
=
x
1
+
x
2
′
s_m=\frac{R_2'}{X_k},X_k=x_1+x_2'
sm=XkR2′,Xk=x1+x2′
也可表示为:
s
m
=
s
n
(
k
m
+
k
m
2
−
1
)
s_m=s_n(k_m+\sqrt{k_m^2-1})
sm=sn(km+km2−1),
s
n
、
k
m
s_n、k_m
sn、km可从产品手册查询
额定负载时:
T
N
=
2
T
m
s
N
s
m
+
s
m
s
N
≈
2
T
m
s
m
s
N
T_N=\displaystyle \frac{2T_m}{\frac{s_N}{s_m}+\frac{s_m}{s_N}}\approx \frac{2T_m}{s_m}s_N
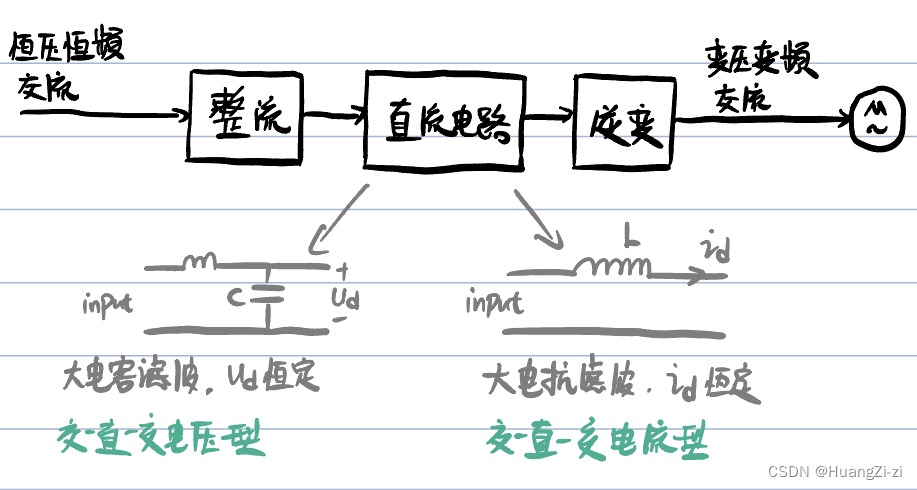
TN=smsN+sNsm2Tm≈sm2TmsN(忽略
s
N
/
s
m
s_N/s_m
sN/sm)
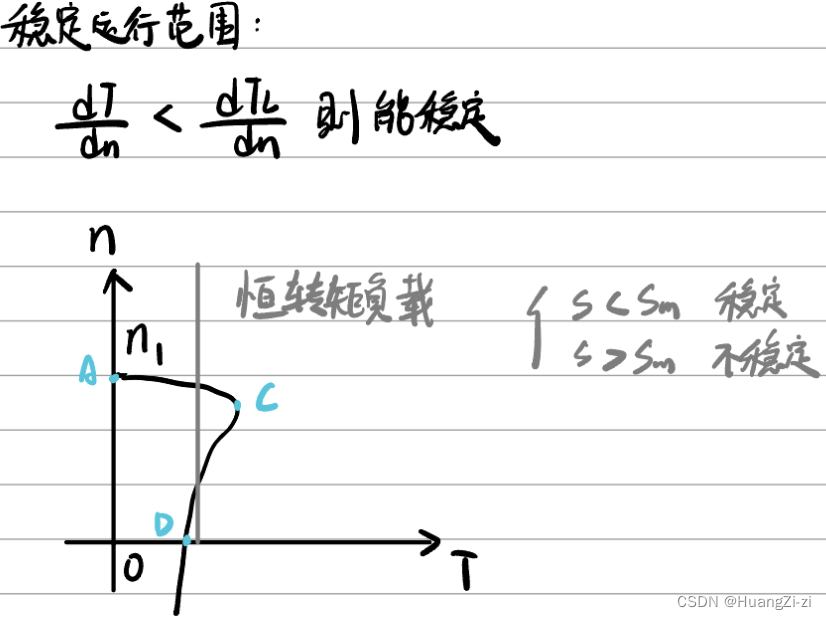
稳定运行的条件
三相异步电机的起动
起动状态,n=0,s=1,起动电流大而起动转矩小
为避免过大电流带来过热问题,需要采取一定的起动方法:
-
直接起动
不采取特殊措施,直接通电。适用于容量小、不需要频繁起动的电机 -
降压起动
I = U R I=\frac{U}{R} I=RU,要减小电流,可以减小电压-
Y − △ Y-\triangle Y−△起动
起动的时候星接,正常工作后角接
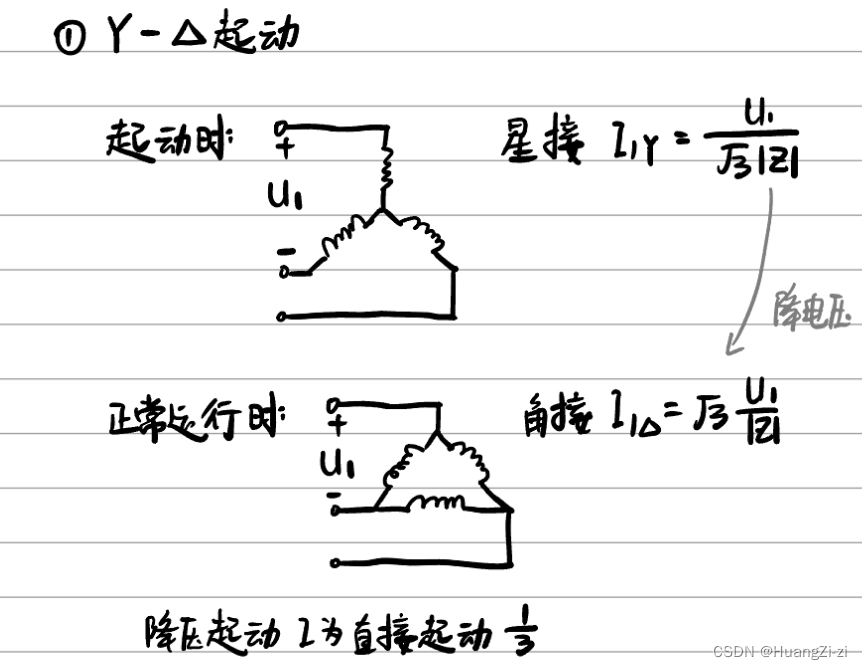
星-角起动有一个问题,就是正常工作时绕组必须是角接,对于一部分电机就不适用了。 -
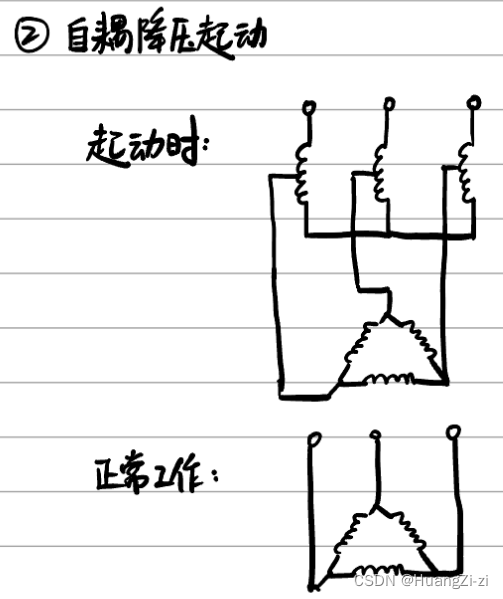
自耦降压起动
加一个自耦变压器,起动的时候先降压再输入到绕组。
正常工作的时候把变压器断开电源直接连接到绕组。
-
-
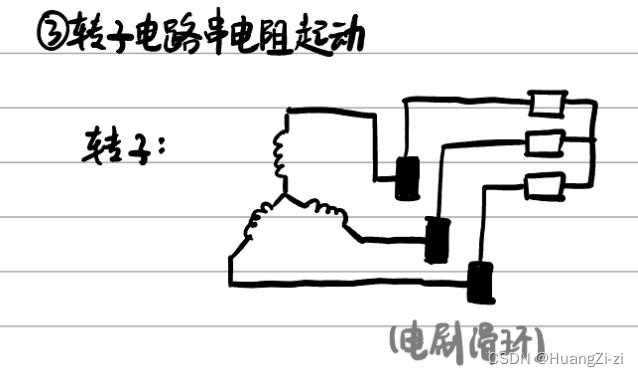
转子串电阻起动
I = U R I=\frac{U}{R} I=RU,要减小电流,也可以增大电阻。这个方法仅适用于绕线型电动机,通过电刷引出转子绕组,增大电阻。
三相异步电动机的调速
n
=
n
s
(
1
−
s
)
=
60
f
1
p
(
1
−
s
)
n=n_s(1-s)=\displaystyle \frac{60f_1}{p}(1-s)
n=ns(1−s)=p60f1(1−s)
要改变转速,可以改变p、s、f
变极调速
适用于鼠笼型电机
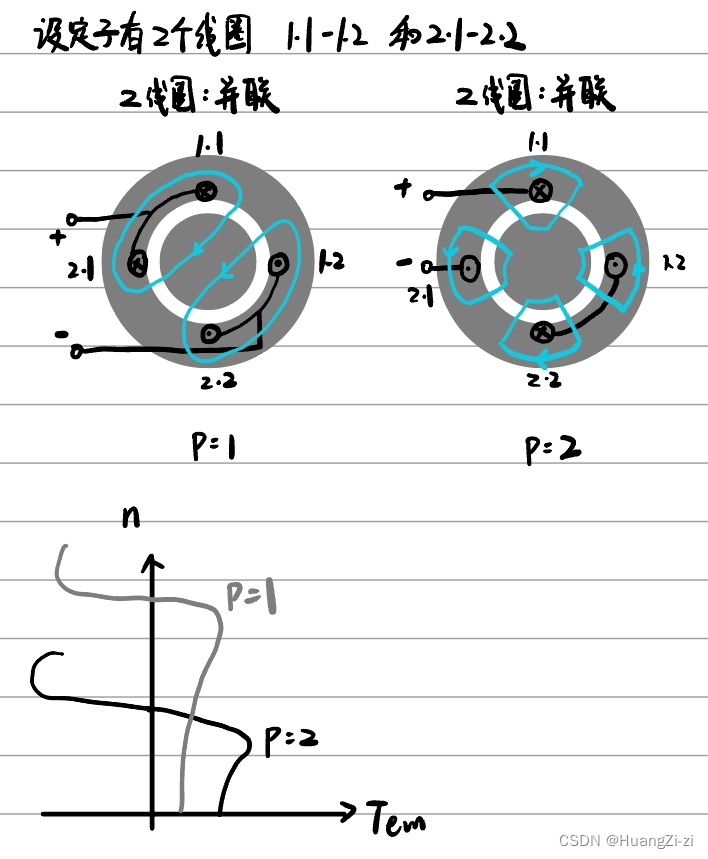
定子线圈采用不同的接法,产生p不同的旋转磁场,p不同就起到了调速的作用
这样调速优点:
机械特性较硬、稳定性好
效率高、控制方便接线简单价格低
问题:调速平滑性差,转速几乎是成倍变化的
变转差率调速
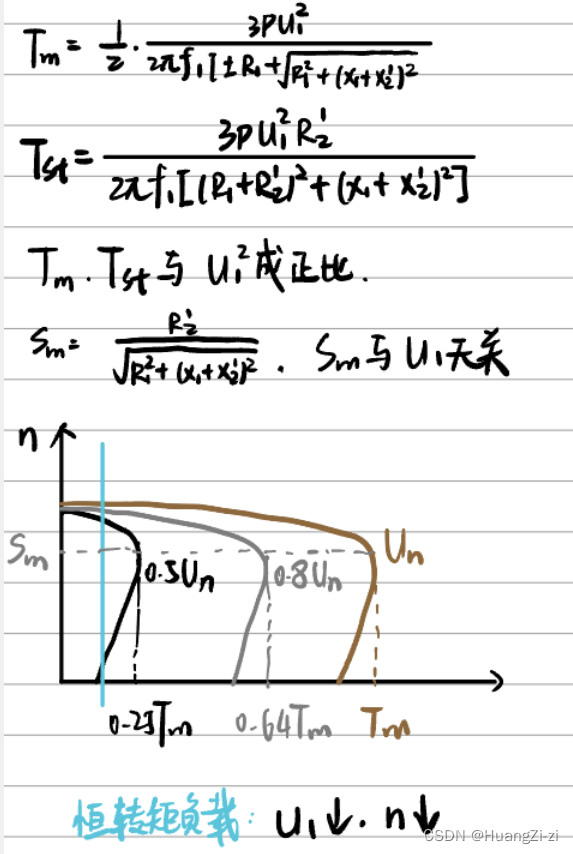
改变定子端电压调速
T e m = P e m ω 0 = m 1 ω 0 I 2 ′ 2 R 2 ′ s T_{em}=\displaystyle \frac{P_{em}}{\omega_0}=\frac{m_1}{\omega_0}I_2'^2\frac{R_2'}{s} Tem=ω0Pem=ω0m1I2′2sR2′
对于恒转矩负载,即调速时
T
e
m
T_{em}
Tem不变:
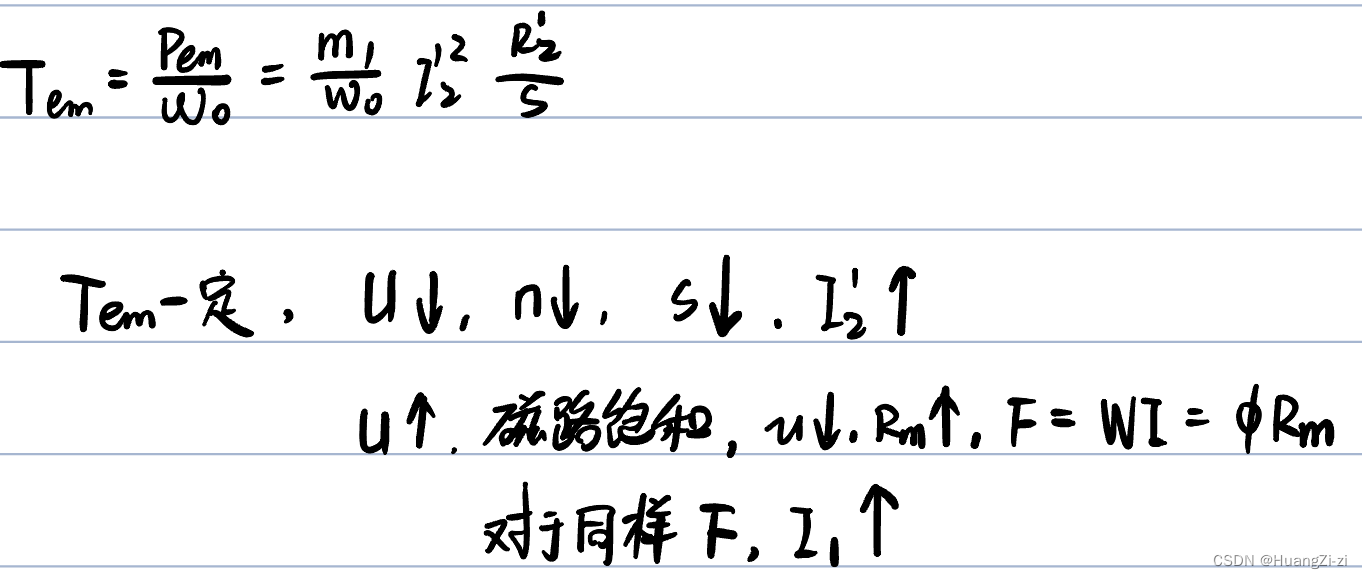
不论向上调速还是向下调速,都面临电流大于额定值的问题,所以向下调速不能超过10%,向上不能超过5%。
对于恒转矩负载,在
s
>
s
m
s>s_m
s>sm后就不能稳定,因此调速范围很小。但如果是风机类负载,调速范围就比较大了

转子回路串电阻调速
对于绕线转子异步电动机,转子回路串入电阻不仅可以用来起动,也可以用来调速。
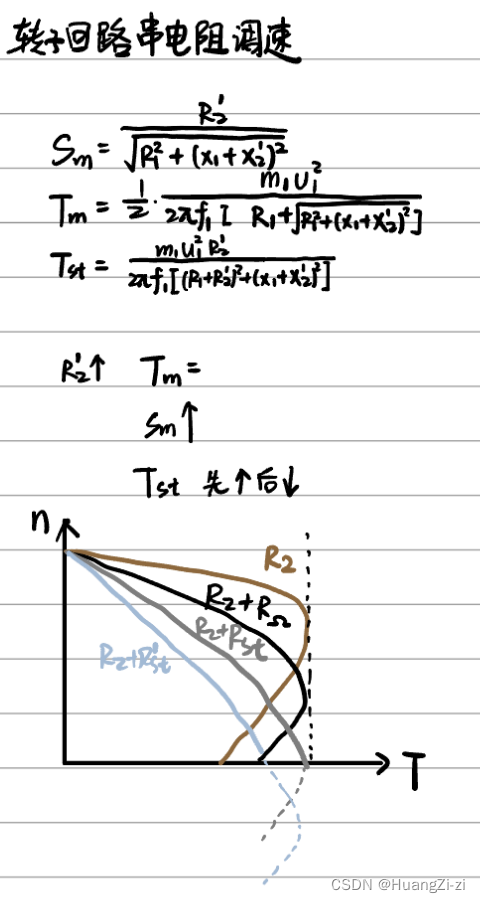
对于恒转矩负载,有:
R
2
s
1
=
R
2
′
s
=
常值
\displaystyle \frac{R_2}{s_1}=\frac{R_2'}{s}=常值
s1R2=sR2′=常值
这种调速方式铜耗大,效率低,调速平滑性差,但是方法简单,工作可靠。
串级调速
思路跟串电阻调速是一样的,不过这里直接串入电压源了。
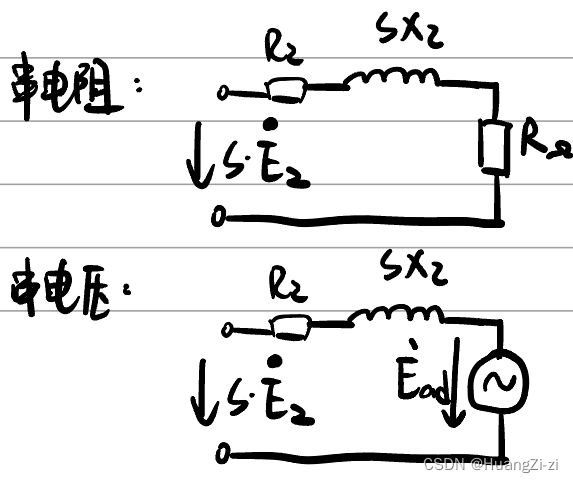
串入的附加电势记为
E
a
d
E_{ad}
Ead
可以证明,当定子端电压和负载转矩不变时,若附加电势与转子电势同频,相位相同或相反,则有:
s
E
2
±
E
a
d
≈
常值
sE_2\pm E_{ad}\approx常值
sE2±Ead≈常值,因此可以通过改变
E
a
d
E_{ad}
Ead来改变s
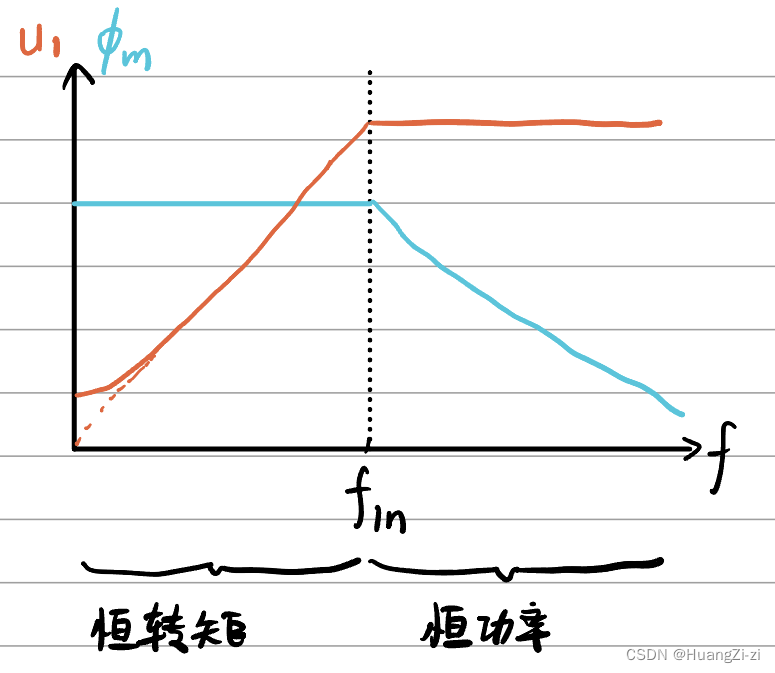
变频调速
从电网获得的交流电是恒压恒频的,但是可以通过变频调速系统,变成变压变频的交流电(幅值、频率都可调),这样控制的自由更多。
从基频向下调速
也就是把频率调低。
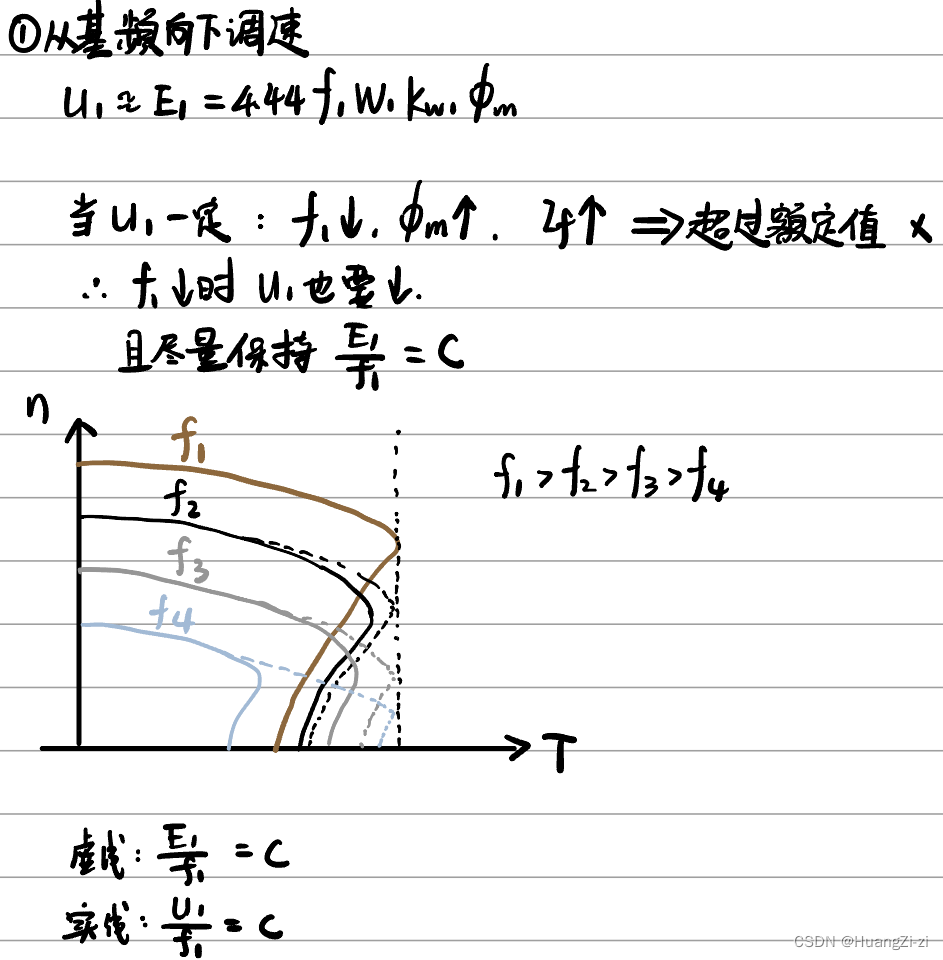
为了保证励磁电流不超过额定值,从基频向下调速必须同时减小定子感应电势
E
1
E_1
E1,保证
E
1
/
f
1
E_1/f_1
E1/f1为常数。
而
E
1
E_1
E1无法直接测量和控制,所以用
U
1
U_1
U1来近似,如果保持
U
1
/
f
1
U_1/f_1
U1/f1不变,那么会观察到最大转矩随频率降低而减小(因为不再满足近似),所以控制系统中在频率较低时,会适当增大电压,来保证最大转矩基本恒定。
T = C T ′ Φ m I 2 ′ cos φ 2 T=C_T'\Phi_mI_2'\cos\varphi_2 T=CT′ΦmI2′cosφ2, E 1 / f 1 E_1/f_1 E1/f1不变则 Φ m \Phi_m Φm不变,转矩恒定。而转速可调,因此非恒功率工作。
从基频向上调速
也就是把频率调高

电机电压不允许高于额定电压,因此不能再保持
U
1
/
f
1
U_1/f_1
U1/f1不变了。把U恒定,只改变f。
f增大,
Φ
m
\Phi_m
Φm减小,转矩减小。电机电磁功率和输出功率基本不变,为恒功率调速。
频率很低时一般提高
U
1
U_1
U1来补偿漏磁保证
ϕ
m
\phi_m
ϕm不变,因此
U
1
/
f
1
U_1/f_1
U1/f1不再线性
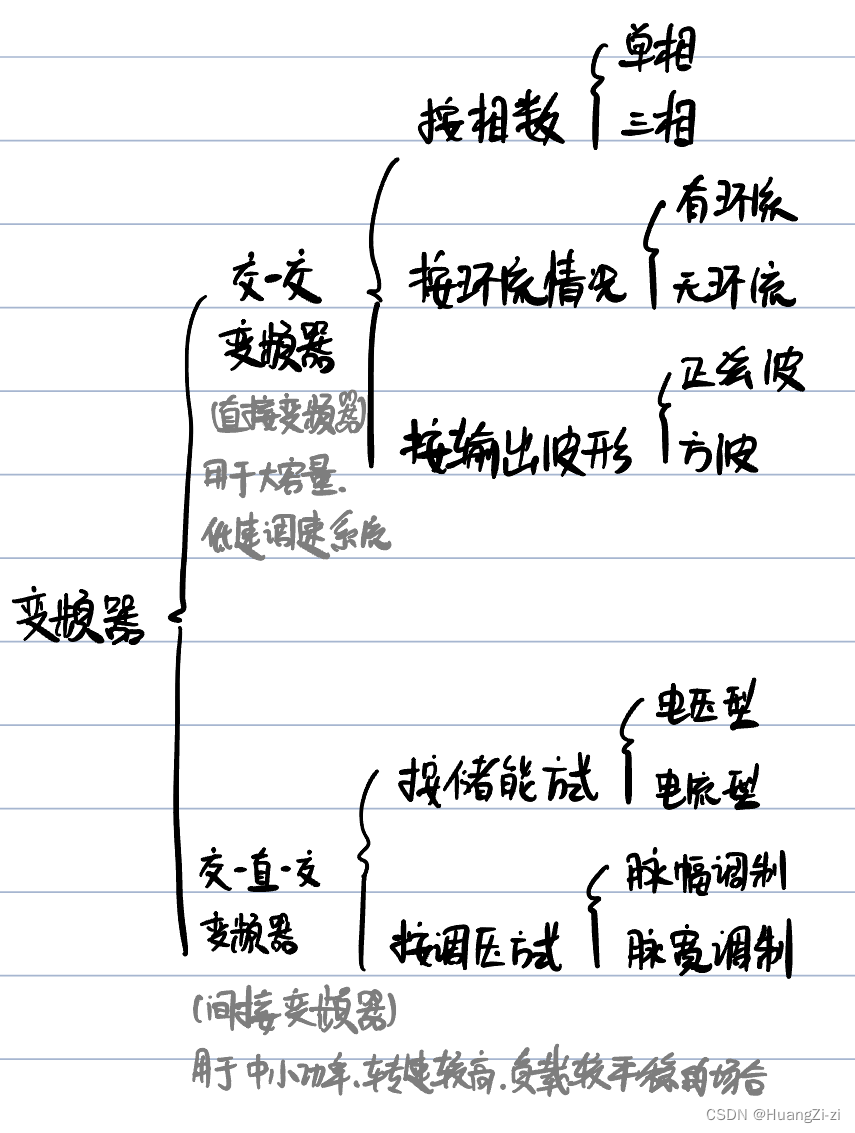
变频器
-
变频器的分类
-
交-直-交变频器的结构
-
变频器电压调节方式
- PAM:脉冲幅值调节
- PWM:脉冲宽度调节
- SPWM:正弦脉冲宽度调节
-
变频器的控制方式
- U/f控制变频器(压频比控制)
- SF控制变频器(转差率控制)
- VC变频器(矢量控制)
小偏差信号变频调速
异步电动机一般非线性都比较严重,所以传递函数也只是定性的给出。

矢量控制
了解一下这个概念就行。大致思想就是把原本耦合的量转变成不耦合的量,进行控制。
异步电动机的电气控制
没啥好说的,就是开关、保护器、起动装置等等东西,知道有就行。
两相异步电动机
两相电机可以根据用途的不同,分为两个大类,即驱动电动机和伺服电动机。
驱动电动机要求效率高,因此转子电阻小,气隙磁场接近正圆形。
伺服电动机要求稳定运行区间大,因此在第一象限机械特性下垂,也就是转子电阻足够大。
根据前面分析非圆形旋转磁场那里可以知道,两相电动机可以有三种工作状态:
- 两相绕组通入等幅相差90度电流——圆形旋转磁场
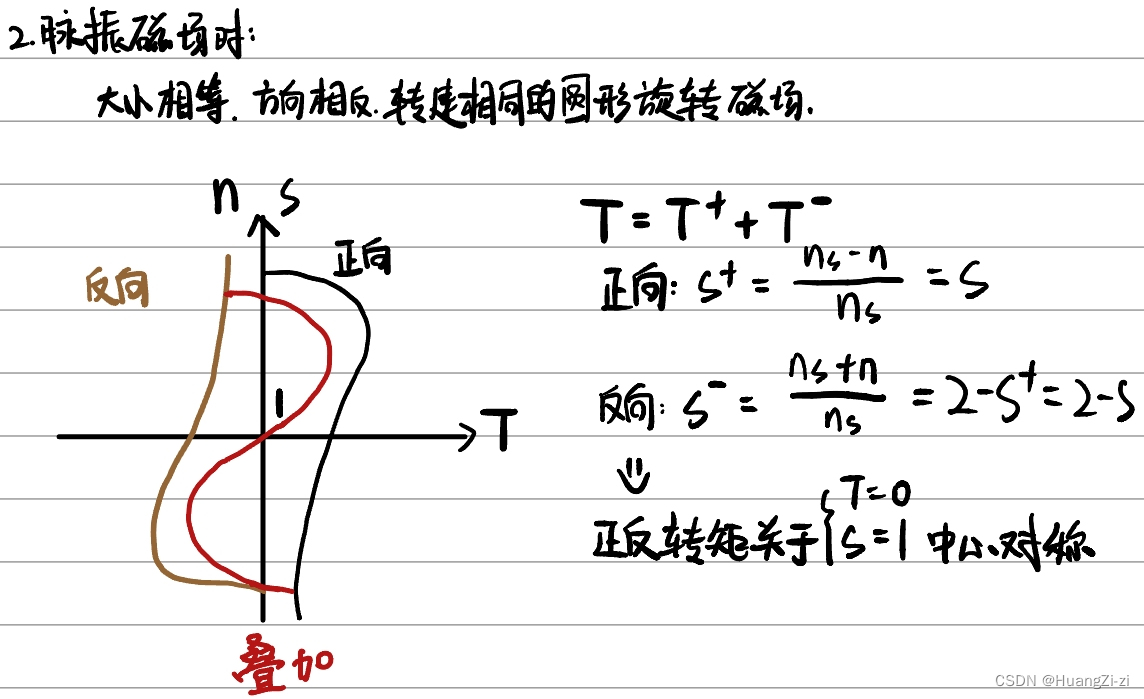
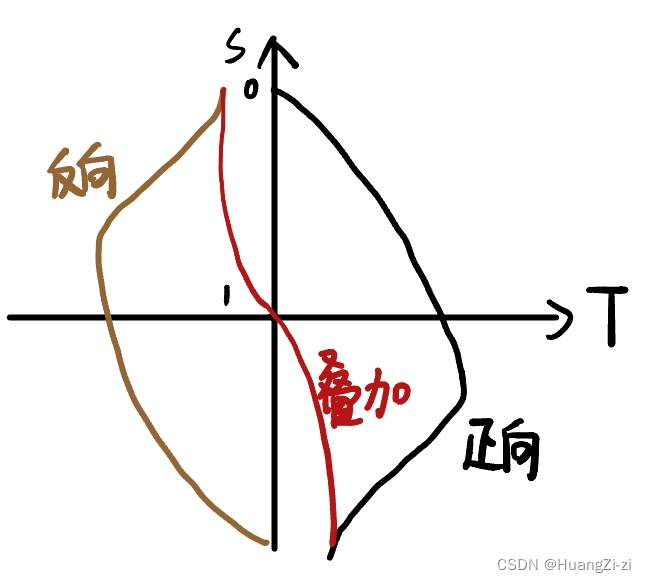
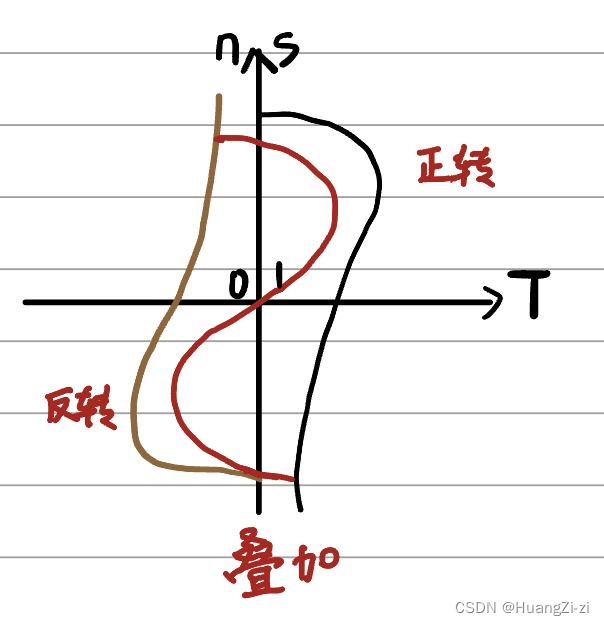
- 两相绕组通入等幅同相电流——脉振磁场
脉振磁场可以看成两个圆形旋转磁场相叠加,因此转矩也满足叠加。
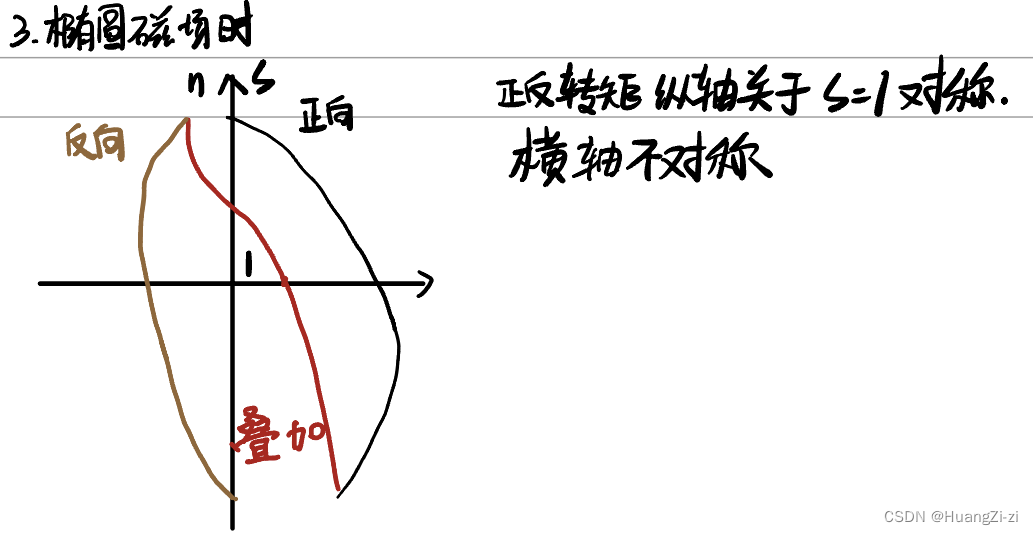
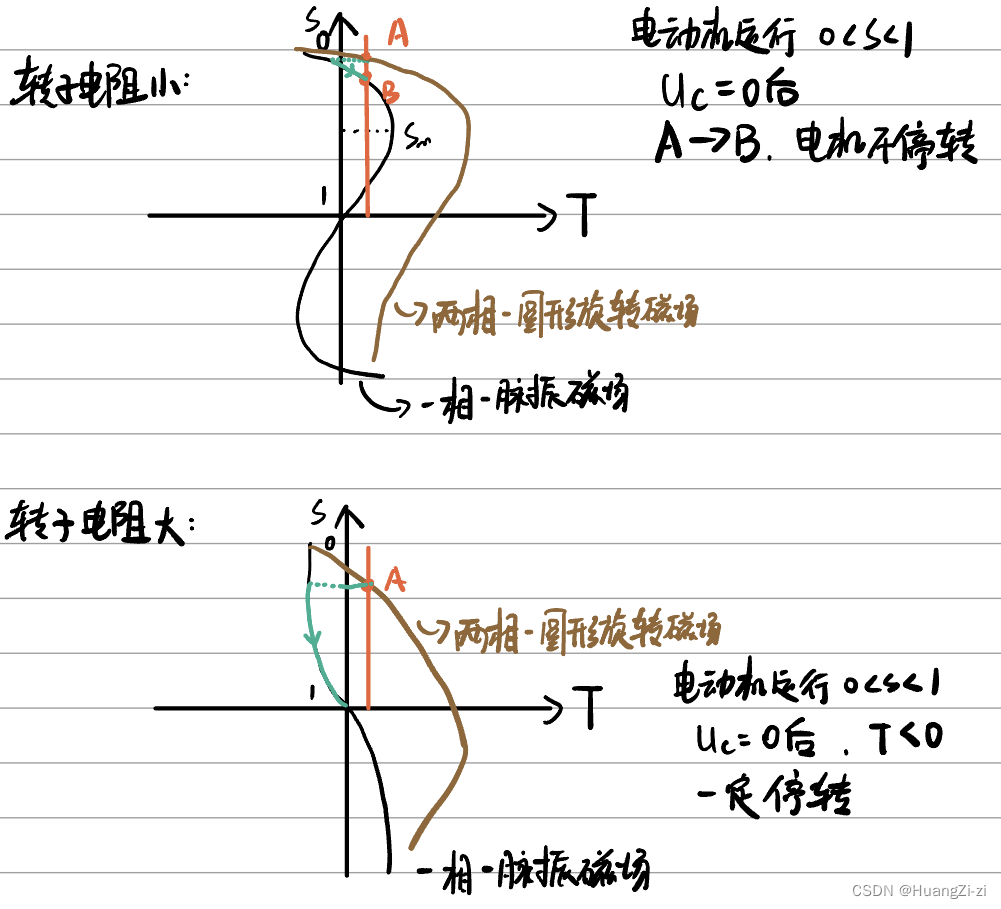
当转子电阻不同时,正反圆形旋转磁场的机械特性也不同,所以叠加出来也有可能是这种形状:
- 两相绕组通入不等幅相差90度电流——椭圆旋转磁场
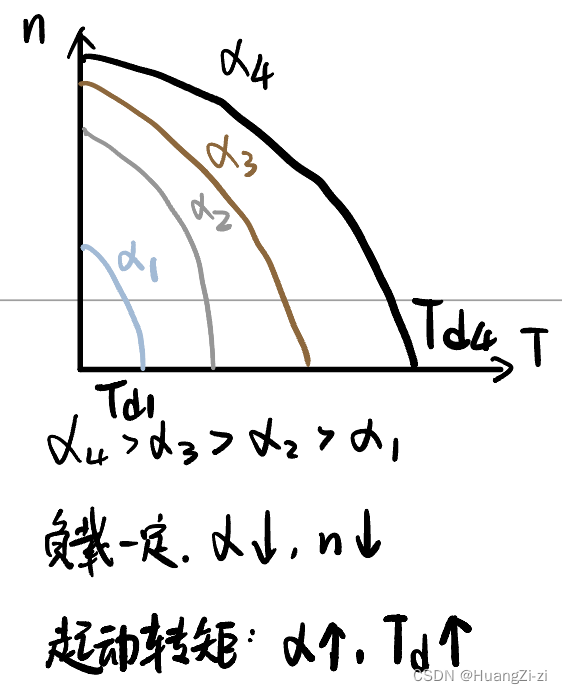
调节特性:
两相伺服电动机
要求两相伺服电动机转子电阻足够大,是为了消除自转现象。
所谓自转现象,就是控制电压为0后,电机不停转,反而继续旋转的现象。
假设控制电压不为0时,电机工作在圆形旋转磁场下:
除了消除空转以外,增大转子电阻还可以增大调速范围、使机械特性更加线性,对于伺服电机是有好处的。
结构特点
这个和直流伺服电机是一样的,要减小转子的转动惯量,因此转子一般做得细长。
除了笼型转子,还有非磁性空心杯转子和铁磁性空心杯转子,其本质就是一个条数无穷大的笼型转子。
两相伺服电机的控制
理想工作状态:两绕组空间相距90度电角,通入时间相差90度的电流,工作在正圆形旋转磁场下。
而改变控制电流的大小或者相位,就可以控制电机的工作状态。
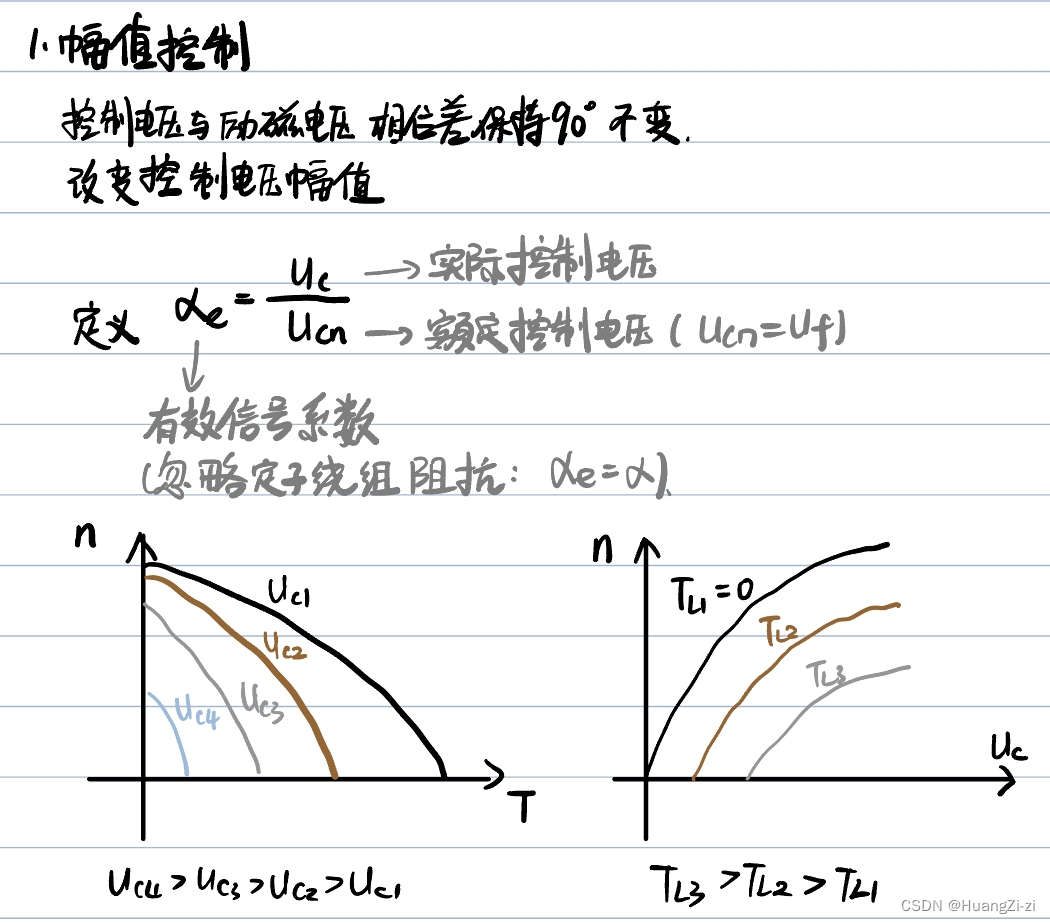
幅值控制
信号系数与椭圆度近似相同
相位控制
控制电压幅值不变,仅改变相位
相位控制线性度较好但是线路复杂、发热严重,使用很少
双相控制
励磁电压和控制电压保持相位差为90度,同时改变幅值
双相控制效率高发热少,但非线性严重,使用很少
幅相控制(电容控制)
励磁回路串联电容起移相作用。当控制电压改变时,由于电磁感应,励磁回路的电流也会改变,而由于电容的作用,使得励磁电流幅值、相角都改变。

与幅值控制相比,由于两相电流相位差不是严格90度,因此转矩下降,非线性更严重。
与相位控制相比,两相电流相位差约在90-100度之间变化,相差不大,具有更强实用性。
由于线路简单,应用广泛。
两相伺服电机的动态特性
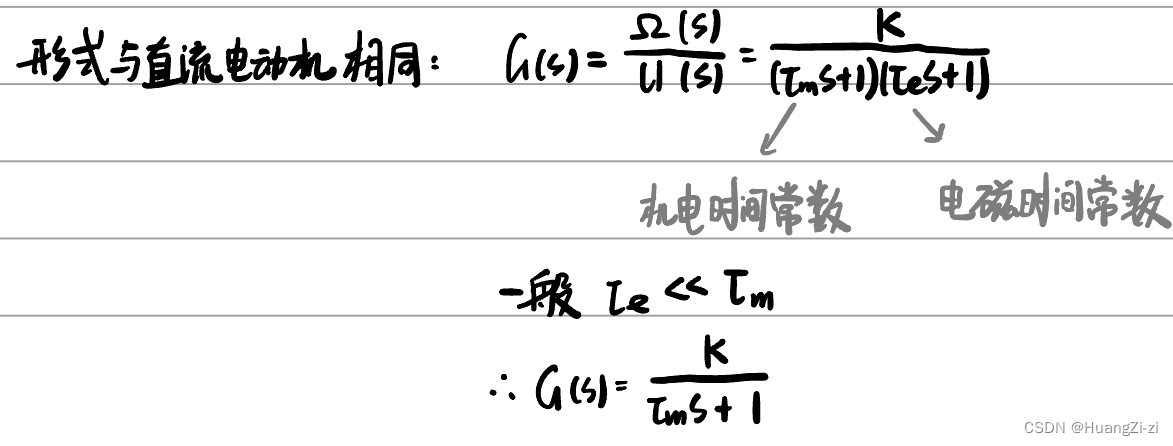
传递函数
跟三相电机一样,因为非线性严重,所以只是定性给出传递函数。
与直流伺服电机对比
- 机械特性和调节特性:直流伺服电机线性,交流非线性
- 动态响应:差不多。直流电机有电枢绕组和换向器故转动惯量更大,但机械特性更硬
- 自转现象:仅存在于交流电机,通入单相交流电仍保持旋转
- 物理属性:交流电机体积大重量重、效率低,仅适用于小功率系统。但结构简单,运行可靠
单相异步电动机
家用电器都是接单相交流电的,所应用的也就是单相异步电机。
单相异步电机结构简单成本低廉,应用广泛。
与三相异步电机相比,体积大,功率因数低、过载能力差,仅适用与小容量场合。
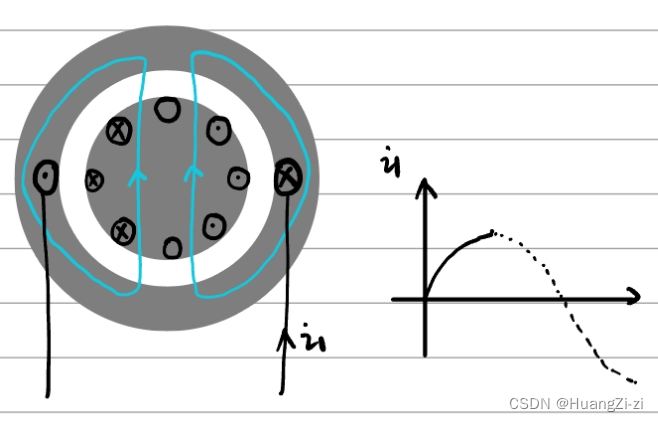
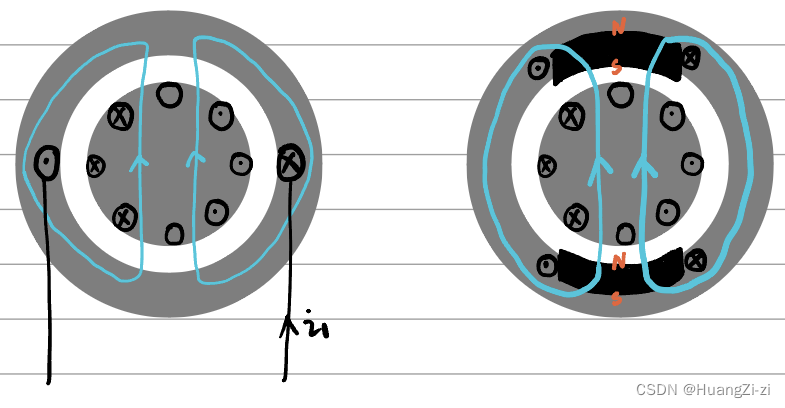
工作原理
定子通入单相交流电
当通入电流增大时:
-
左右两部分所受力大小相等,方向相反,完全抵消,是没有起动转矩的。
跟前面分析两相伺服电机的时候一样,在脉振磁场中的机械特性:
-
借助外力旋转起来以后,去除外力仍可以保持稳定运行。而旋转的方向与受外力旋转的方向相同。
-
电机启动后,由于存在负序转矩,使合成转矩减小,过载能力下降、转子铜耗与铁耗增加。
负序转矩:反向旋转磁场产生的转矩(单独看正向磁场或者反向磁场,产生的转矩是大于叠加磁场的)
铜耗和铁耗的增加,主要是由于转速降低,定转子电流增大、温度升高
单相异步电机的起动
单相运行的电动机没有起动转矩,为了使电动机可以自行起动并改善运行性能,除了工作绕组(主绕组),一般还要加装起动绕组(副绕组)。
分相起动
两套绕组在空间不同相位,两套绕组通入不同相位的交流电流(本质上相当于两相电动机)
单相电容启动
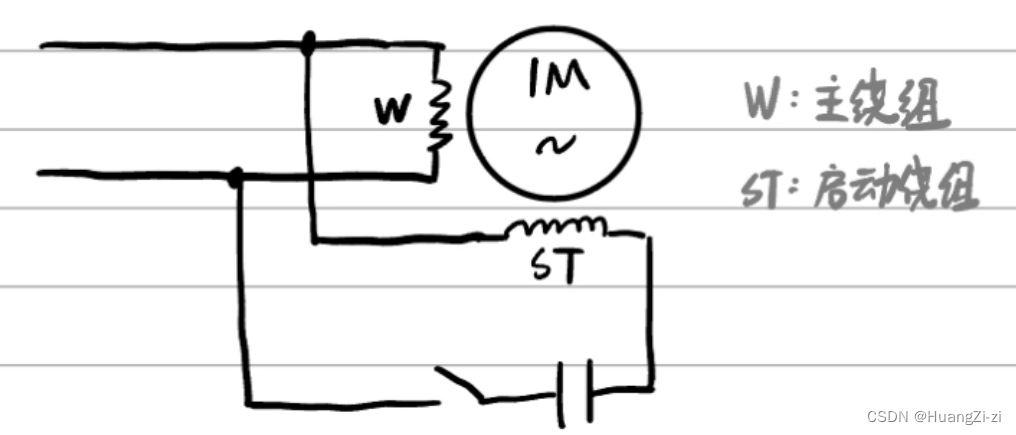
副绕组串接电容,利用电容移相,使两绕组电流相位差约为90度。
副绕组受离心开关控制,当电动机转速达到一定数值以后,断开副绕组。
单相电阻起动
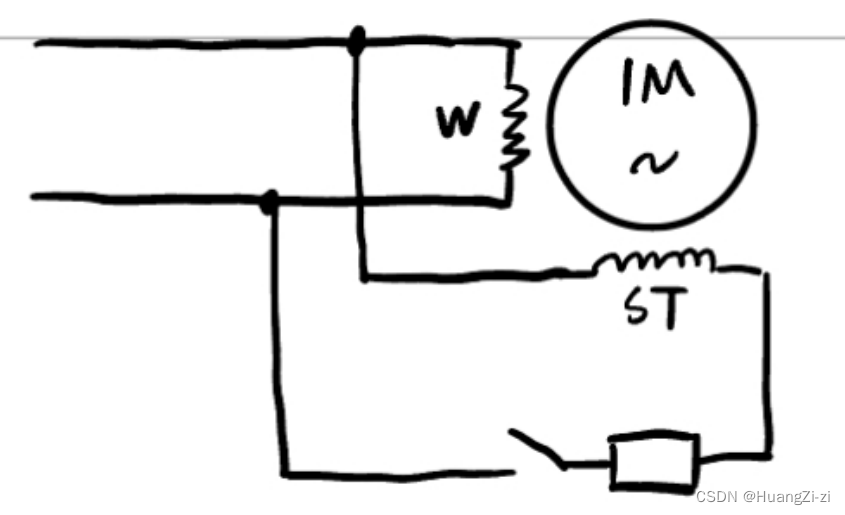
副绕组串联电阻(或不用串联),匝数较少,导线较细,使得副绕组支路总电阻远大于感抗,近似认为副绕组与电源同相位
主绕组匝数较多,导线较粗,使得主绕组感抗远大于电阻,近似认为主绕组滞后电源90度
同样副绕组由离心开关控制
单相电容运行
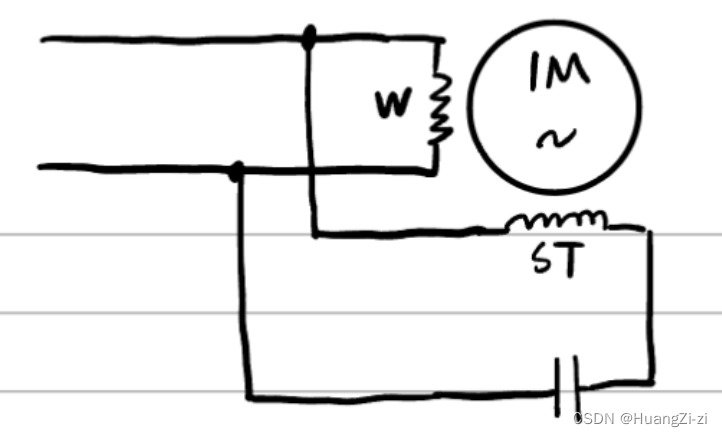
和单相电容起动是一样的,区别在于没有离心开关
双值电容单相异步电动机

结合了单相电容起动和电容单相运行。
起动的时候两电容并联,容量叠加,提升起动性能
运行时仅保留
C
2
C_2
C2,保证运行性能
罩极起动
电机定子有凸极式和隐极式,凸极式最常见,下面分别是集中励磁和分别励磁
所谓罩极,就是在每一个磁极面越1/4~1/3处开槽,套上短路环或者匝数很少的闭合绕组,就好像把这部分磁极罩起来一样。
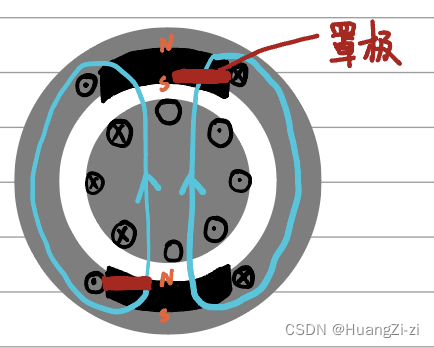
罩极就是与励磁线圈平行的闭合回路
罩极起动主要运用的就是楞次定律:
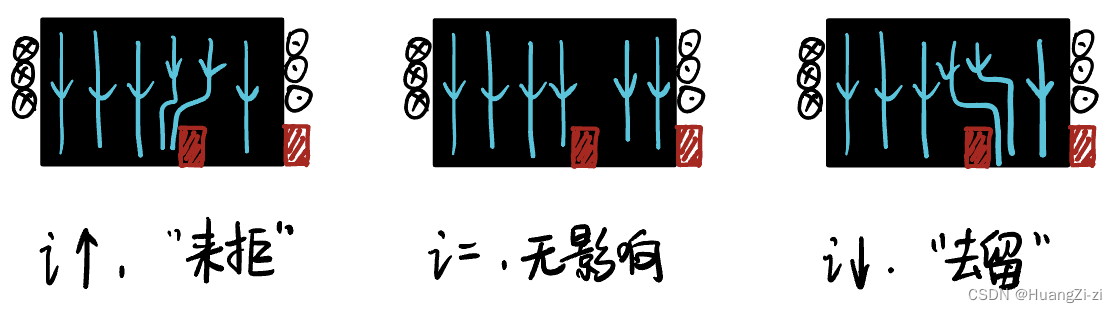
在励磁电流和短路环的共同作用下,磁极之间的磁场连续移动,总是由未罩部分移向被罩部分,可以类比为旋转磁场。因而使得笼式转子可以获得起动转矩。
但缺点在于起动转矩小,仅适用于清载或空载启动的场合
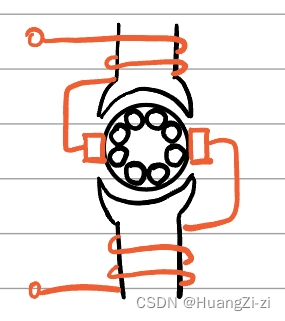
单相串励电动机
其结构与电磁式串励直流电动机相同
接交流电时,电枢电流和励磁电流同时改变方向,因此转矩方向不变。
与串励式直流电机的不同在于:
- 为了减少铁耗,铁心磁路用软磁材料,薄片叠成
- 为了减小电抗压降,励磁线圈匝数少、加设补偿绕组,电枢导体数多。
如果经过特殊设计,这种电动机接直流电或交流电都可以运行。比如在电力设施不完善的地区,白天可以用电网的交流电,晚上可以用电瓶的直流电。
单相串励电机的特性
C
1
∼
C
6
C_1\sim C_6
C1∼C6都是常数(不需要知道是多少)
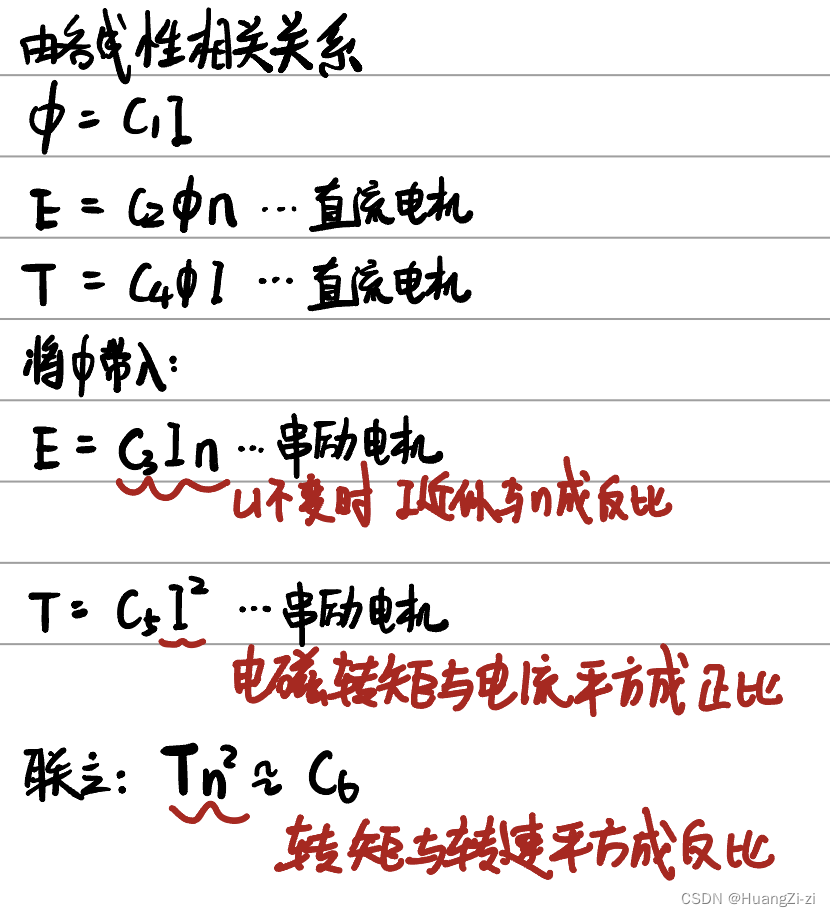
忽略绕组阻抗压降:
U
≈
E
U\approx E
U≈E
电压U不变时:
3.
I
I
I近似与
n
n
n成反比
4.
T
T
T与
I
2
I^2
I2成正比
5.
T
T
T近似与
n
2
n^2
n2成反比
换一个角度来理解这三个关系:
